Les travaux préliminaires
La caisse de la crémaillère n’était plus en état et il a donc fallu la changer; pour les non initiés, ci-dessous quelques photos du système à crémaillère des pinasses qui permet, sur une ligne d’arbre classique, de relever l’hélice afin de bénéficier d’un tirant d’eau minimum; cela est rendu possible par l’utilisation d’un cardan situé à l’extérieur de la coque juste après le presse-étoupe dans la boite à cardan.
-

- Le système de crémaillère, ré-installé dans la nouvelle caisse
-

- Détail de la crémaillère
-

- Le cardan et la boite à cardan au fond dans la nouvelle caisse
L’installation
Ayant décidé de refaire entièrement le pont qui avait, malgré des replâtrages réguliers, beaucoup vieilli, il fut aisé à Vincent Ronco, en charge du travail de charpente, de modifier l’emplacement de la cloison de rouf, de remplacer les carlingues moteur afin de les adapter au moteur électrique et de réaliser le bac à batteries.










Les batteries dans leur bac
Une fois le pont et le rouf terminé (magnifique travail de charpente maritime traditionnelle réalisé par Vincent Ronco), le coffre à batterie est réalisé et solidement fixé aux varangues ; à l’intérieur, les batteries sont espacées de l’épaisseur d’un tasseau de 20mm, entre elles et avec les cloisons (un vide de 10mm est recommandé par le fabricant de batteries Mastervolt).
Puis la cloison de rouf est installée, ainsi que les carlingues moteur, solidement fixées sur les varangues ; je réalise par moi-même l’ensemble de l’installation électrique et je positionne sur la cloison les différents composants additionnels électriques : chargeur 48 volts, convertisseur CC-CC 48V/12V (pour alimenter l’équipement électrique et en particulier les deux pompes de cale), le tableau électrique avec fusibles, l’afficheur de contrôle Masterbus, la clef et l’afficheur de contrôle du moteur, ainsi que la pompe à eau de refroidissement du moteur.
J’installe la prise inox P17 pour l’alimentation 220 volts du chargeur avec son disjoncteur différentiel sur la demi-cloison bâbord, à l’abri de la pluie sous le passavant ; le vase d’expansion pour le liquide de refroidissement du moteur est lui installé sur la demi-cloison tribord.
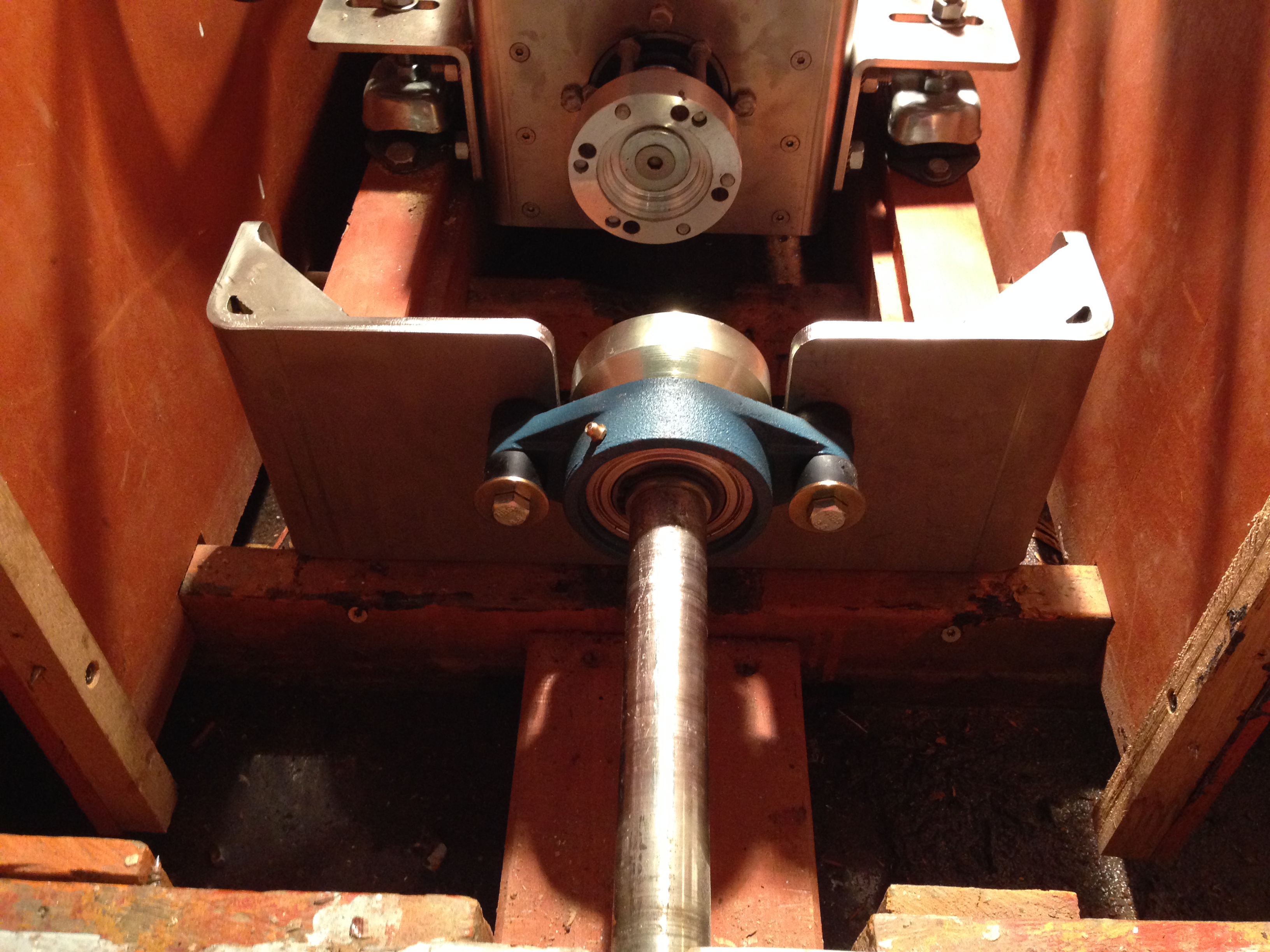
Le palier de buté monté sur la pièce inox
Le plus délicat fut ensuite l’installation du palier de buté ; celui-ci est fixé sur une plaque inox de 10mm d’épaisseur découpée pour s’adapter au palier de butée ; cette plaque est elle-même fixée sur les carlingues moteur sur lesquelles elle reporte les efforts de propulsion ; le positionnement vertical et horizontal du palier de buté est important car celui-ci doit être parfaitement aligné avec l’arbre d’hélice.

Le coupleur A-Flex devant le palier de butée
L’utilisation du coupleur A-Flex rend par contre l’installation du moteur un véritable jeu d’enfant puisque, combiné aux réglages verticaux et horizontaux des silentblocs du moteur, il procure une latitude de réglage dans tous les plans.
 Une fois le moteur en place, le coffre moteur est installé ; il reçoit sur ses flans les composants électriques de puissance du moteur : deux fusibles principaux et deux relais de sécurité (un pour chaque cluster batterie), ainsi qu’une distribution digitale Mastervolt qui permet de connecter simplement et très proprement les différents composants ; cet équipement inclue le fusible du chargeur et le fusible général alimentant le tableau électrique.
Une fois le moteur en place, le coffre moteur est installé ; il reçoit sur ses flans les composants électriques de puissance du moteur : deux fusibles principaux et deux relais de sécurité (un pour chaque cluster batterie), ainsi qu’une distribution digitale Mastervolt qui permet de connecter simplement et très proprement les différents composants ; cet équipement inclue le fusible du chargeur et le fusible général alimentant le tableau électrique.
Le commissioning
Les batteries
Le commissioning a été réalisé par David Foret de Mastervolt France ; il consiste principalement à vérifier le bon fonctionnement des relais de sécurité et à configurer les évènement du réseau Masterbus, réseau qui fait communiquer entre eux les différents composants du système électrique Mastervolt, en particulier bien sûr les batteries Lithium-ion et le chargeur, afin de garantir un fonctionnement optimum et en toute sécurité du système.
Le seul point à noter est que David Foret n’a pas utilisé le paramétrage par défaut des batteries Lithium-ion, mais il a utilisé un paramétrage avec un voltage maximum de 55 volts, indiquant que leur experience les faisait préférer cette limitation qui garantit une meilleure utilisation du chargeur; le très léger allongement du temps de charge n’a, pour mon utilisation, aucune conséquence.
Comme prévu les batteries ont été enregistrées sur le réseau Masterbus en deux clusters de deux batteries chaque: un cluster avant et un cluster arrière.
Une page favorite a été créée pour l’afficheur MasterView du réseau Masterbus; elle indique pour chaque cluster batterie le pourcentage de charge, la consommation instantanée en Ampères, ainsi que le temps restant jusqu’à épuisement des batteries; cet afficheur constituera bien sûr la « bible » de navigation.
Enfin deux alarmes ont été créées pour chaque cluster batterie, l’une se déclenchant lorsqu’il ne restera plus que 40% de charge, l’autre lorsqu’il ne restera plus que 20% de charge; en plus de l’afficheur, chaque alarme déclenchera un buzzer qu’il faudra acquitter.
Remarque: il est à noter qu’afin de préserver au mieux les batteries Lithium-ion et afin de garantir les 2.000 charges-décharges annoncées par le constructeur il est recommandé, bien que ce ne soit pas indispensable, de ne pas, ou uniquement occasionnellement, dépasser les 80% de décharge.
Le moteur
J’ai par contre réalisé par moi-même le commissioning du moteur, celui-ci se limitant à entrer dans l’afficheur digital du moteur les informations spécifiques au parc de batteries Lithium-ion et à vérifier que les informations relatives aux caractéristiques du moteur Aquamot soient correctes.
